A Summary of MTP Results for HIPPO-4
MJ Mahoney/JPL and Julie Haggerty/NCAR
Last Revision: January 12, 2012
We summarize on this web page, the results of the analysis of the Microwave Temperature Profiler (MTP) data obtained on the NSF/NCAR GV (NGV) during the HIPPO-4 field campaign. Its purpose is two-fold: to present the final MTP data with comments on each flight, and to discuss the excellent temperature calibration that was achieved.
Introduction
In our archived 'MP-files' we provide in the header record a comment urging users of these files to come to this web page for specfic comments on the quality of the MTP data for each of the HIPPO-4 research flights. For this reason we put the comments first in this summary. Following these comments, we provide information on how the temperature was calibrated (very successfully) for the HIPPO-4 campaign.
Comments on the HIPPO-4 MTP Final Data
The following table provides a link to a color-coded temperature curtain (CTC) for each of the HIPPO-4 research flights. More importantly, the table also provides a comments field where specific comments will be provided for each of the flights. Clicking on each thumbnail image will show the full-sized CTC image in a popup window, so that the image can be viewed while reading the comments. These comments are important because the rapid ascents and descents of the GV during the HIPPO campaigns degrade the quality of the MTP retrievals. On the other hand, this profiling -- as will be discussed below -- allowed very accurate temperature calibration.
First we provide an elaboration on the impact of rapid ascents and descents on the quality of the MTP retrievals. When retrievals are performed, the retrieval coefficients that we use assume that the pressure altitude is approximately constant. Clearly over an ~20 second MTP scan, this is not the case. Given a typical ascent or descent rate of ~150 m/s, 3 km are traversed in the vertical. (The actual distance is more like 2 km because not all of the 20 seconds is needed for measurements, but this is still unacceptably large.) We have tried to save as much of the ascent and descent data as possible by changing the editting threshold when it appears that the retrievals are consistent with the short level flight segments. This can be done by examining the behaviour of the tropopause or the temperature field retrievals during ascent or descent compared to those during the level flight segements.
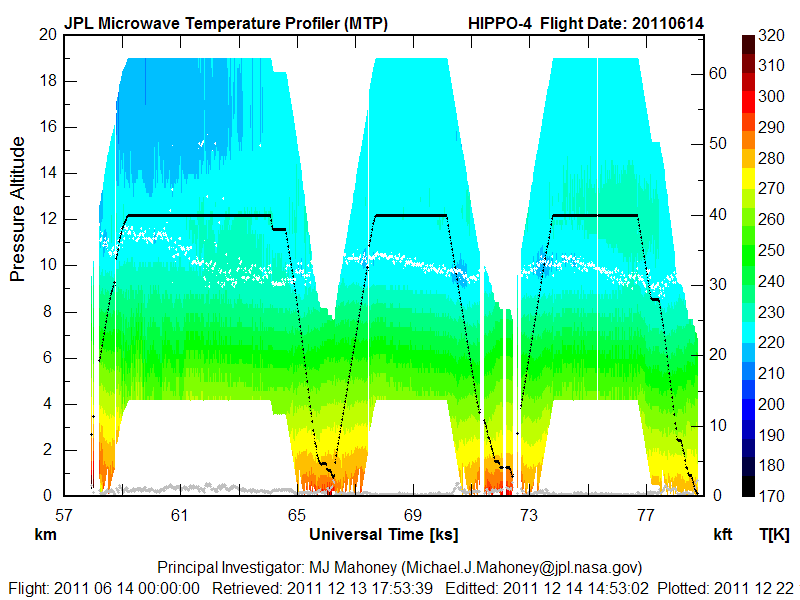
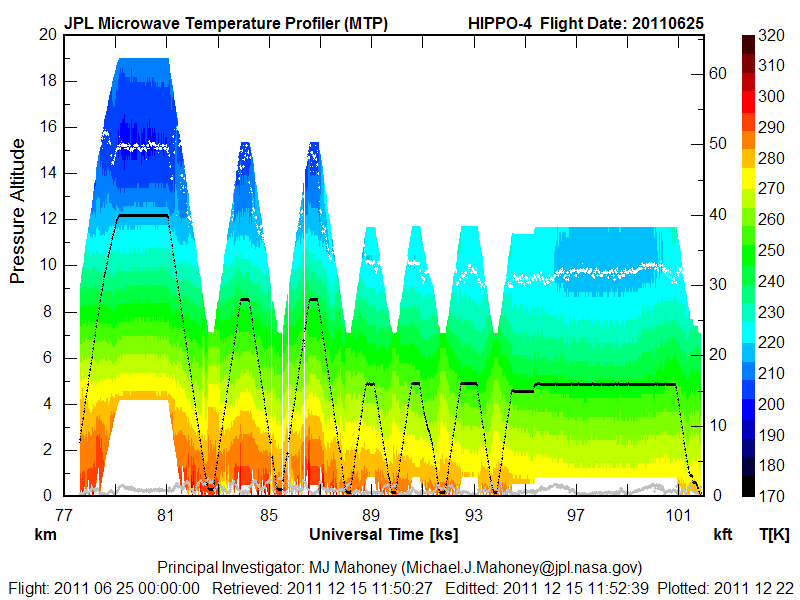
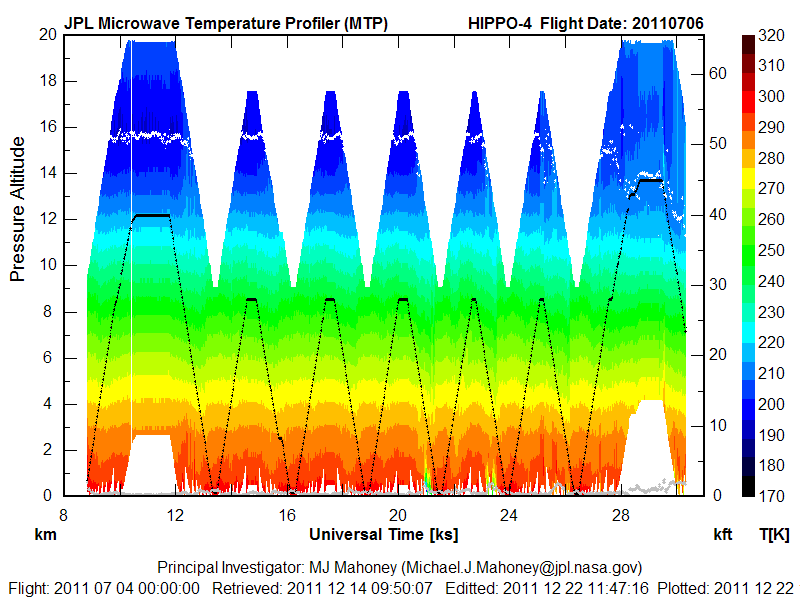
On each of the following CTC plots the x-axis is the Universal Time (UT) in kilo-seconds (ks), the left y-axis is the pressure altitude in kilometers (km), and the right y-axis is the pressure altitude in thousands of feet (kft). On the right is the color-coded temperature scale, which ranges from 170- 320 K. Also shown on each plot is the GV's altitude (black trace), the tropopause altitude (white trace), and a quality metric (gray trace at the bottom). The quality metric, which we call the MRI, ranges from 0 to 2 on the left pressure altitude scale. If the MRI is <1, we consider the retrieval to be reliable; if it is >1 the retrieval is less reliable, and users should contact us as to whether it can be used or not. The MTP final data have been editted to include retrievals with the MRI<0.8. If this excludes a specific time period that someone is interested in, they should contact us to see whether we can salvage that time period.
For most of the flights the CTC plots (which in fact are plotted using the archived data) are restricted to ±8 km from flight level. On a few flights this was increased so that higher tropopauses could be plotted; this was the case for several tropical flights.
| CTC | Comments |
|
RF01 - 20110614 |
Transit flight from RMMA to Anchorage, Alaska The data for this flight looks excellent |
|
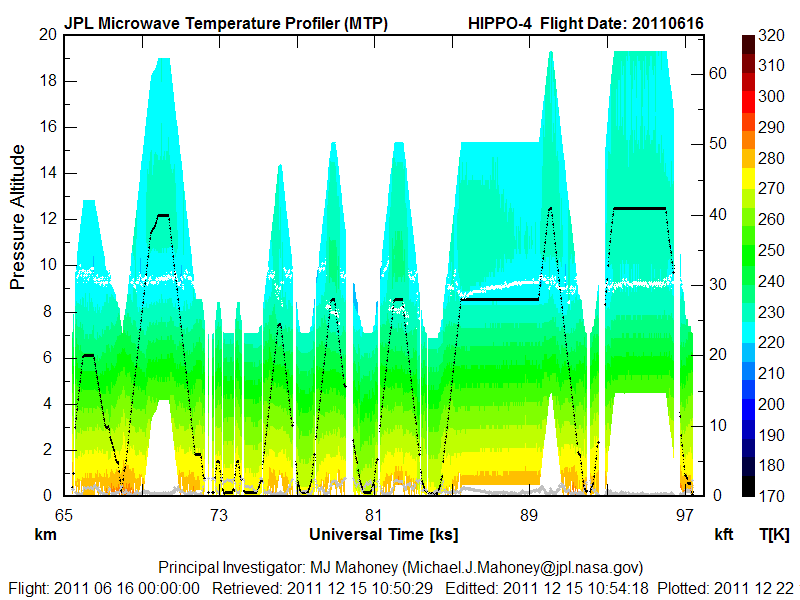
RF02 - 20110616 |
Anchorage, Alaska, to the North Pole and back The data for this flight looks excellent. The tropopause determinations are a little high during the rapid ascents and descents between 75 and 83 ks. |
|
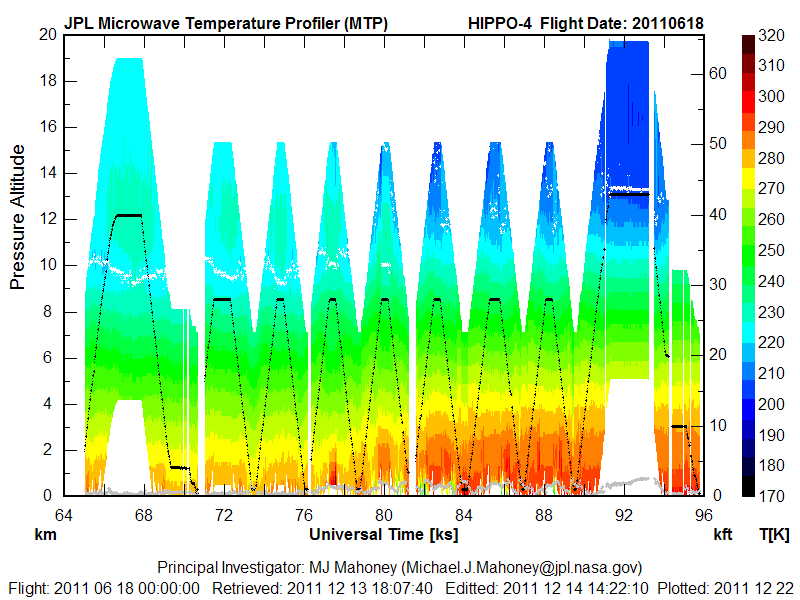
RF03 - 20110618 |
Anchorage, Alaska to Kona,Hawaii The data for this flight looks excellent. The tropopause determinations are a little erratic during the rapid ascents and descents between 78 and 90 ks. |
|
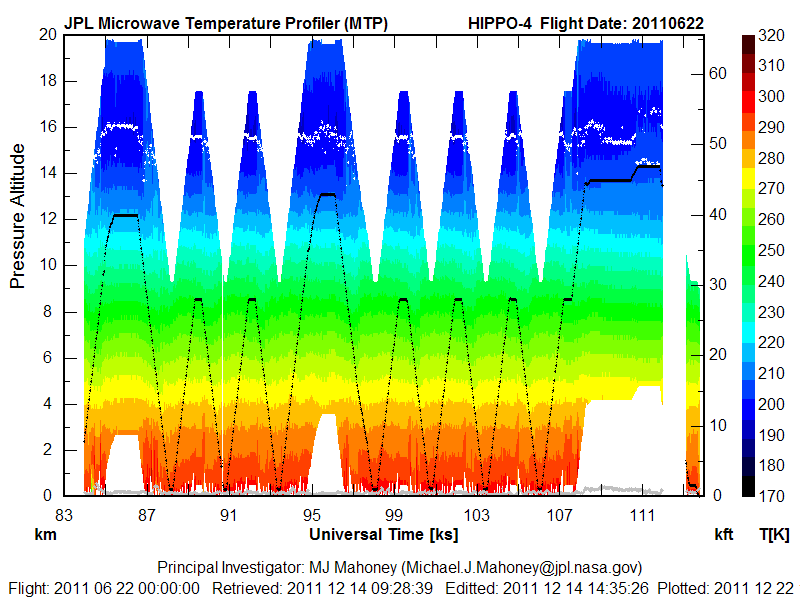
RF04 - 20110622 |
Kona,Hawaii to Rarotonga This flight looks very good. |
|
RF05 - 20110625 |
Rarotonga to Christchurch, New Zealand The data for this flight looks excellent. The tropopause determinations are a little erratic during the rapid ascents and descents between 81 and 88 ks. |
|
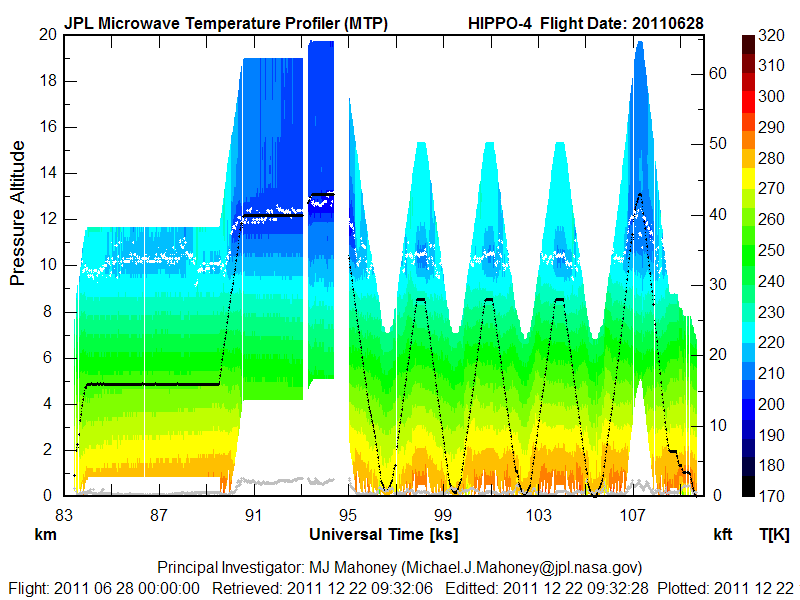
RF06 - 20110628 |
Christchurch, New Zealand to Hobart, Tasmania This flight required the most work on retrieval coefficients. This because the NGV entered the polar vortex south of New Zealand. This compromised the retrievals from 90-95 ks, but the results are acceptable. |
|
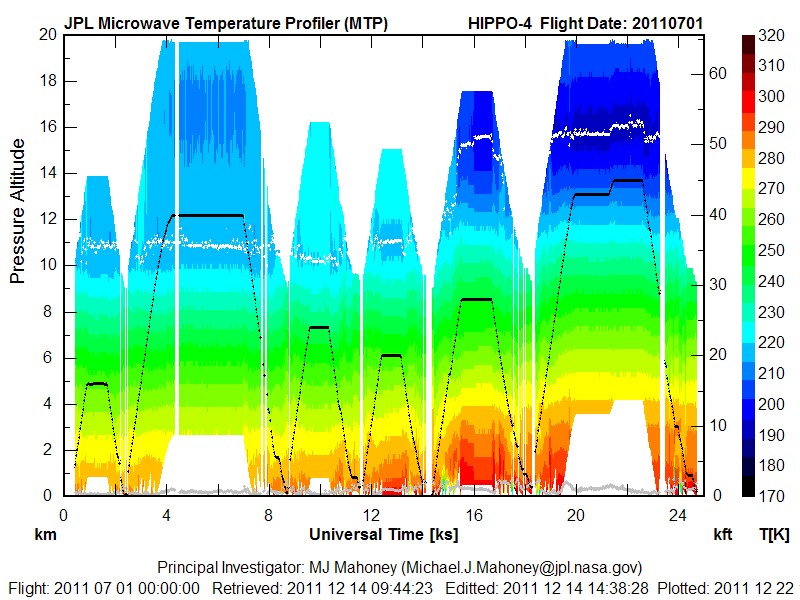
RF07 - 20110701 |
Hobart, Tasmania to Darwin, Australia The data for this flight looks excellent. The tropopause determinations are a little erratic during the rapid ascents and descents between 14 and 18 ks. |
|
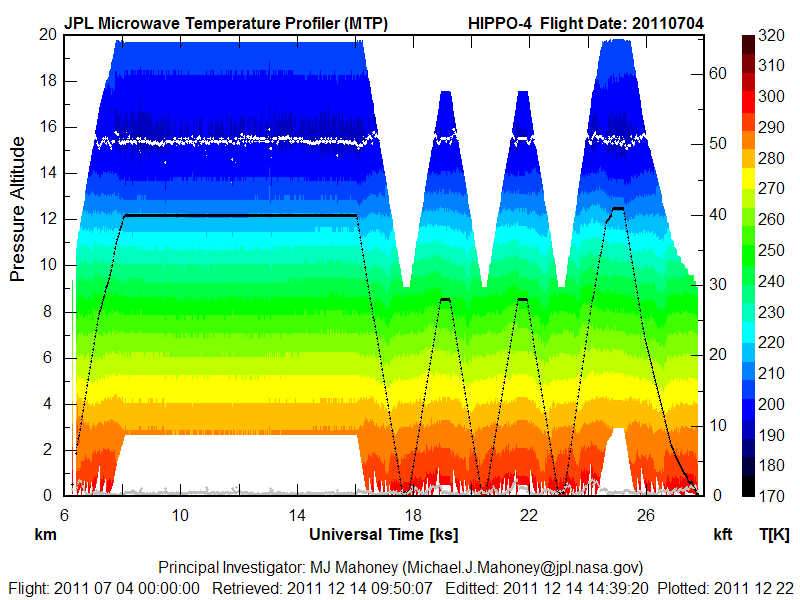
RF08 - 20110704 |
Darwin, Australia to Saipan, Mariana Islands As on the previous HIPPO campaigns, we will use this flight as our "typical" performance example! The retrievals are excellent. The retrieval range was increased to ±10 km from flight level in order to show the tropopause. |
|
RF09 - 20110706 |
Saipan, Mariana Islands to Midway Islands The retrievals are very good. The tropopause solutions are off a bit during the rapid ascents and descents between 21 and 26 ks. |
|
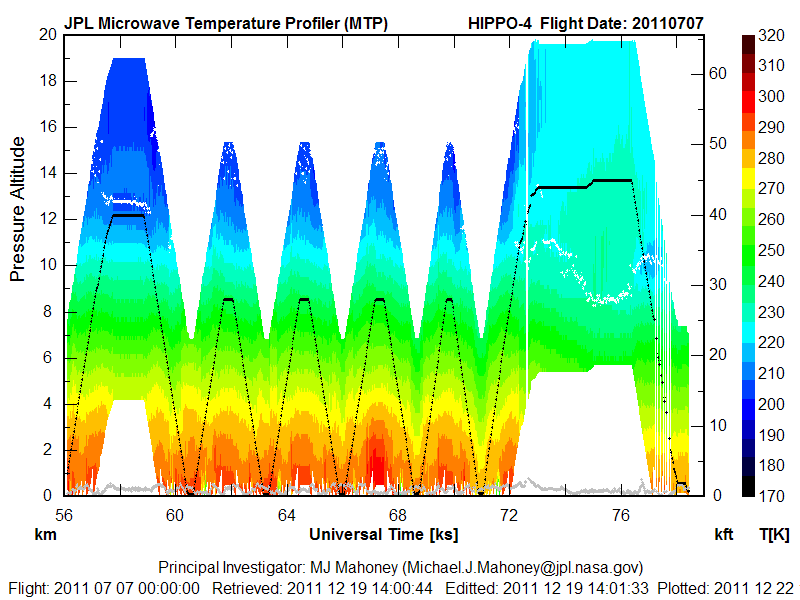
RF10 - 20110707 |
Midway Islands to Anchorage, Alaska The data for this flight are fine. |
|
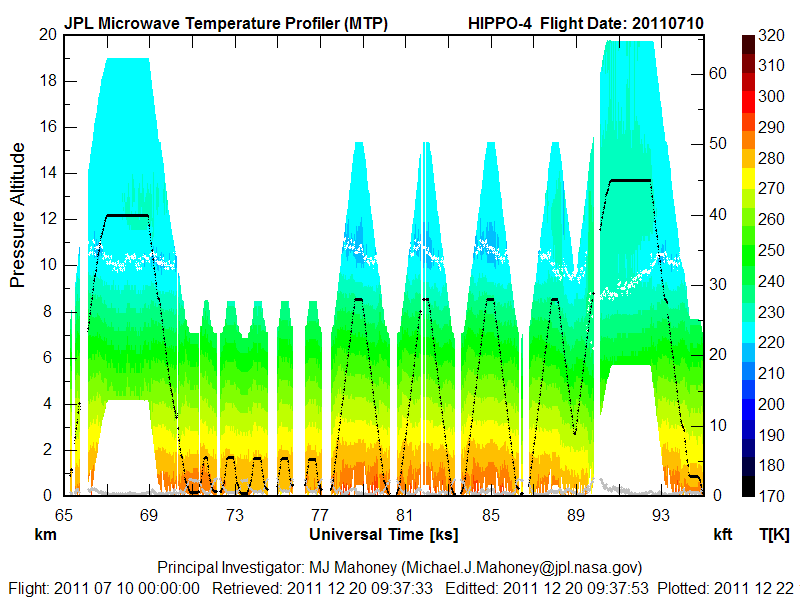
RF11 - 20110710 |
Anchorage, Alaska to North Pole and back The data for this flight are fine. As for all the flights the MRI threshold for acceptance was set at 0.8. This caused some low altitude retrievals to be editted out between 71 and 87 ks. |
|
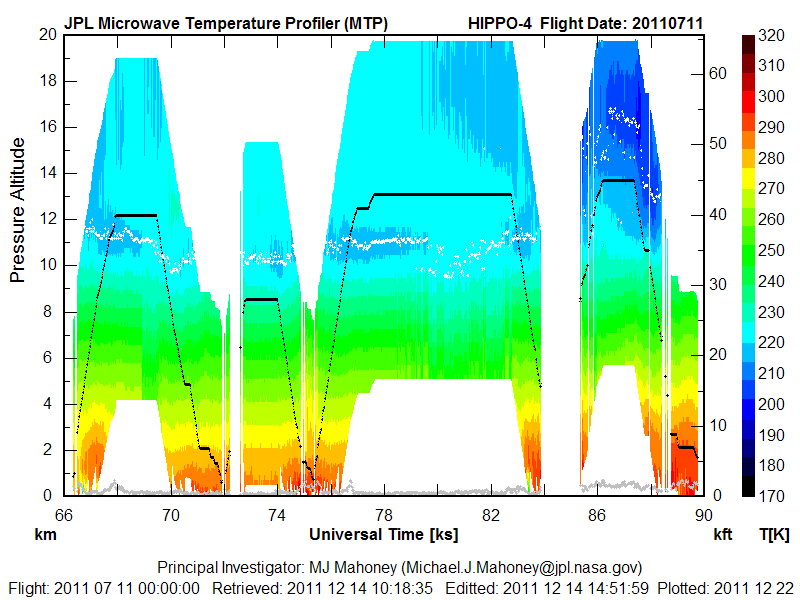
RF12 - 20110711 |
Transit flight from Anchorage, Alaska to RMMA This flight is of good quality. |
HIPPO-4 Temperature Calibration
1) Some Background
For nearly two decades the MTP team has been refining techniques for calibrating in situ temperature measurements made aboard research aircraft using radiosondes launched near the aircraft's flight track. Initially this was done by hand, and could involve as much as a day for a single comparison because of the tedious quality control procedures that had to be implemented (such as limiting pressure altitude excursions during the comparisons, restricting allowable pitch and roll changes, and checking for radiosonde temporal and spatial variability). About a decade ago these procedures were largely automated, but the comparisons were made for the entire MTP-retrieved temperature profile at that time, not just at flight level.
Even though the MTP did not participate in the T-Rex campaign, we were asked if the MTP temperature calibration techniques could be applied to the the research and avionics temperatures measured during T-Rex so that differences in these temperatures could be resolved. During T-Rex the GV flew from RMMA to near Independence, CA, where it spent most of its flight time. In addition to the NWS soundings on transit, Leeds University frequently launched radiosondes from Independence, CA (INCA), so we had a wealth of soundings with which to do comparisons. All of the radiosondes used had an accuracy of ±0.3 K. As described on another web page, we found that both the research temperature Tres (ATRL) and the avionics temperature Tavi (AT_A) had substantial warm biases with respect to radiosondes launched near the GV flight track (Tavi - Traob = 1.21 ± 0.12, and Tres - Traob = 2.37 ± 0.12, respectively). While Tres has the largest warm bias, we also found that the Tavi warm bias is very significantly pressure altitude dependent.
This work to understand the T-Rex in situ temperatures opened the door to a new approach for doing the MTP temperature calibration. As mentioned above we had previously compared the entire retrieved temperature profile to radiosondes, not just the flight level temperature. This often required several retrieval iterations through all the flights to achieve acceptable results. It was realized that, if the flight level temperature was calibrated independently of the MTP data, less work would be needed. (This is the case because previously we applied a correction to the in situ temperature measurement called OATnavCOR. Therefore, everytime OATnavCOR changed we would have to recalculate the instrument gain. If the flight level temperature is accurately calibrated from the start, then OATnavCOR is always 0.0 K, and the instrument gains do not have to be recalculated. This saves a lot of effort.)
We have continued to refine the temperature calibration techniques that we developed for T-Rex on subsequent GV campaigns. There are other web pages that describe this procedure for START-08, HIPPO-1, HIPPO-2, HIPPO-3, PREDICT and DC3-Test.
Before discussing the calibration procedure for the HIPPO-4 field campaign, we will first provide a little background. During the HIPPO field campaigns the GV was for the most part continuously profiling the troposphere (and sometimes the lower stratosphere). This was a significant concern for a number of reasons:
- First, in order to obtain good temperature profile retrievals, the MTP requires that the pressure altitude of the aircraft be relatively constant during the course of a ~20 second scan. This was blatantly not the case when the GV is behaving like an oversized atmospheric yoyo.
- Second, related to this is the fact that we have typically averaged 3 -7 scans to beat down noise introduced by mesoscale temperature variations. Such averaging would be impossible during rapid descents and ascents.
- Third, in the past we have flatly refused to do radiosonde comparisons in the troposphere because of the high lapse rate, and therefore sensitivity to altitude excursions.
- Fourth, in order to do radiosondes comparisons, you need radiosondes. Since most of the HIPPO flights were in radiosonde sparse regions (the Arctic, Antarctic and Pacific Ocean), obtaining enough comparsions to achieve good statistics could be difficult.
- Fifth, careful consideration needs to be given to the dependence of the temperature recovery factor on Mach Number. There is no way that a constant temperature recovery factor can be used when an aircraft (and its in situ temperature probes) are profiling the atmosphere.
For these reasons our hand was forced. Normally when we do radiosonde comparisons, we do them at the time of great-circle closest approach to the radiosonde launch site. We are also careful to make sure that no one radiosonde comparsion overly weights the statistics. For example, suppose that the GV was taking off or landing at an airfield where radiosondes were launched. The "closest approach" algorithm might produce multiple times of closest approach during frequent turns. We would edit out these additional comparisons to avoid overly weighting the statistics to this site. Given the sparsity of oceanic and polar radiosondes, and the desire to have good statistics, we decided to try a new approach for the HIPPO campaigns (and other campaigns where atmospheric profiling is common). Instead of using the great-circle time of closest approach to make the comparison, we decided to do comparisons every 1 km in altitude from 2 km on up with the closest radiosonde launch site that was available. (If the closest radiosonde launch site was very distant, we had a filter that would exclude soundings beyond a specified distance threshold.) This approach would increase the number of potential comparisons by nearly an order of magnitude. But equally as important, it would allow us to assess whether any of the in situ temperature measurements had a pressure altitude dependence, which, as we remarked above, was the case for the avionics temperature during T-Rex. In addition to allowing tropospheric radiosonde comparisons, we would also be forced to abandon averaging of scans to beat down the mesoscale temperature noise, since (when profiling) the temperature change due to altitude change completely dominates any change due to mesoscale temperature variations.
2) What We Did For HIPPO-4
Based on our experience from the HIPPO-2 and HIPPO-3 temperature calibration, where the avionics temperature produced the best results, we decided to proceed with the temperature calibration for HIPPO-4 and HIPPO-5 using the avionics temperature. This would save time waiting for the research temperatures to be calibrated (sic). We also used procedures to calibrate the in situ temperature as a function of Mach Number squared, instead of a simple pressure altitude dependence. Using this procedure we found that the avionics temperature (AT_A), when forced to agree with 89 radiosonde comparisons near the GV flight track had the following corrected (AT_Ac) value:
AT_Ac = AT_A * (1 - 0.00922 * M2) + 0.885
The Mach Number corrections for these corrected temperature measurements are important; it varies from -0.68 K to 0.48 K depending on the Mach Number.
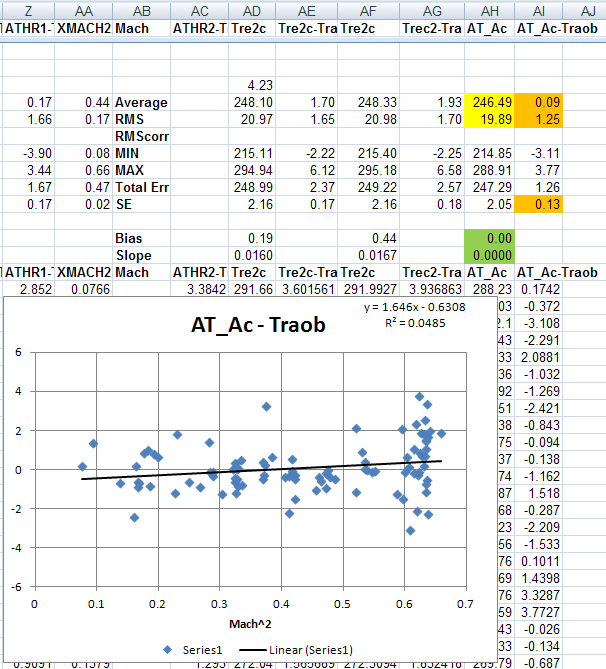
Figure 1a. Ninety-five radiosonde comparisons WITHOUT a Mach Number correction.
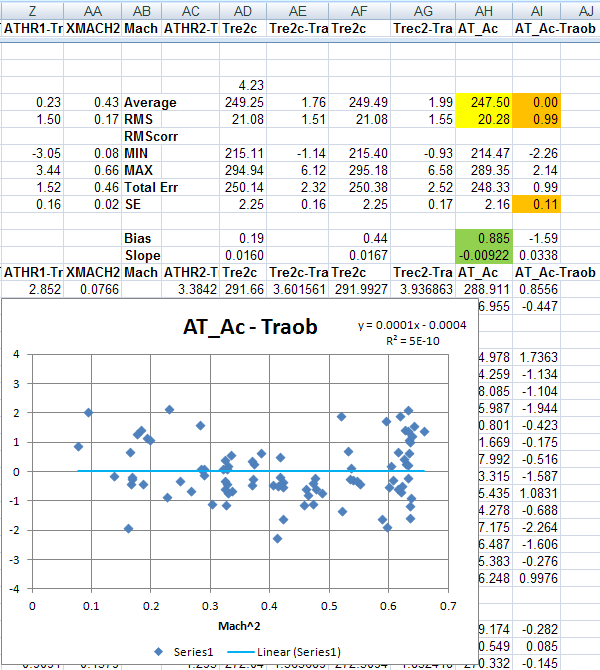
Figure 1b. Eighty-nine radiosonde comparisons WITH a Mach Number correction. The green cells show the bias and slope of the Mach Number correction.
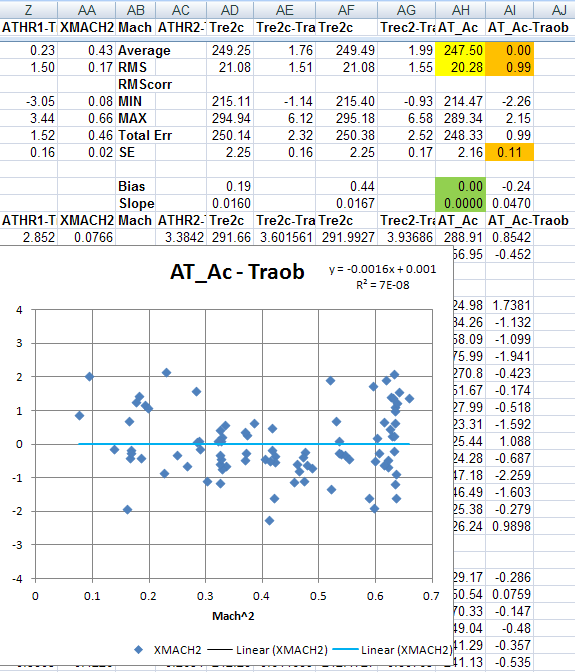
Figure 1c. Eighty-nine radiosonde comparisons a Mach Number correction applied in the analysis code to verify the correction. Note that the bias and slope of the Mach Number correction is zero (green cells).
Because we did radiosonde comparisons every 1 km from 2 km on up whenever the GV made a descent and ascent, we ended up with 95 potential comparisons within a range of 160 km of the aircraft. After these were editted for the criteria discussed above, including non-redundancy, the total number of comparisons was reduced 89. Figure 1a shows these 95 comparisons without a Mach Number correction, Figure 1b shows the editted 89 comparisons with a bias correction of 0.885 K and a slope correction of -0.00922, and Figure 1c just verifies that when the corrections were applied in the data analysis software that the bias and slope corrections go to zero. Note the 'slope correction' is really pressure altitude correction, but it is more closely tied to Mach Number Squared than it is to pressure altitude.
With the corrected avionics temperature (AT_Ac) in hand, we could calculate the MTP instrument gains for each observing frequency as:
G = [Counts (Horizon) - Counts (Target)] / [AT_Ac - Ttarget] in Counts/Kelvin.
where Counts (Horizon) and Counts (Target) are just the output of MTP when looking at the horizon (i.e., an in situ measurement in front of the GV) and the reference target. (The gain calculation is actually not this simple, but we'll spare you the details!) With the gains in hand, we could now do retrievals. After the first pass through all the flights, we calculate what we call a Window Correction Table (WCT). These are small temperature corrections that are applied to the measured brightness temperatures to correct for scan mirror side lobes. By design the WCT is always 0.0 K when the scan mirror elevation angle is zero, so this does not affect the flight level temperature calibration. Another retrieval pass is now made through all the flights with the WCT applied.
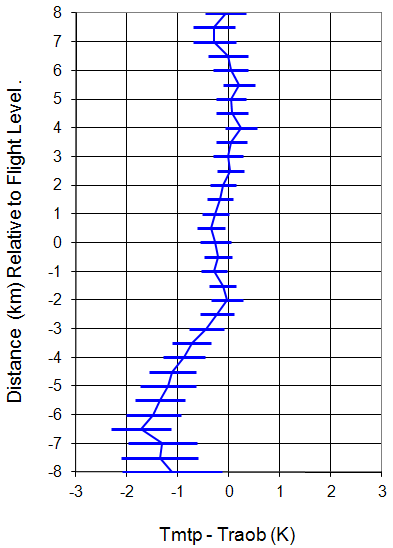
Figure 2a. Assessement of MTP performance relative to radiosondes BEFORE RAF correction.
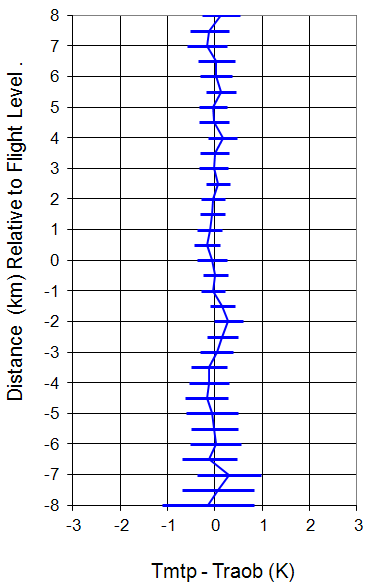
Figure 2b. Assessement of MTP performance relative to radiosondes AFTER RAF correction.
At this point we assess the accuracy of the MTP retrievals at all retrieval altitudes, not just flight level. This is done in Figure 2. In Figure 2a we show the MTP accuracy with respect to flight level for the 53 radiosonde comparisons. (This is less than the original 89 comparisons because we wanted to exclude comparisons made when the GV was below 8 km as surface emissivity measurements would affect the results.) It is obvious that the retrieved MTP temperatures below the aircraft have a cold bias relative to radiosondes. This happens on the HIPPO flights because when the GV descends toward the ocean, the MTP 'sees' emission from the ocean which is colder that the air just above it. We have algorithms that can deal with this issue, but instead we took a simpler approach (to save time), which we call the RAF-correction ( REF-file After Fix, or RAF). Since the accuracy assessment is telling us that the MTP retrieved temperatures are too cold below the aircraft, we simply do a sixth-order polynomial fit to determine the correction that gives the smallest over-all bias with respect to radiosondes. This is shown in Figure 2b Note that this does create a very small bias at flight level; however, our goal is to provide the best retrieved temperatures at all retrieval levels, not just flight level.
















