Introduction
The sonics used during OHATS were calibrated by Campbell Scientific prior to the field program and intercompared in the NCAR wind tunnel after the field program. Two corrections will be made to the OHATS sonic data. One correction is for sonic tilt due to small misalignments of the array support structure and sag of the sonic booms, and the other correction is for movement of the array support structure in the wind.
Sonic Calibration and Intercomparison
Prior to the field program, the 15 Penn State sonics used in OHATS (s/n 246, 247, 364, 366-370, and 373-379) were upgraded to Campbell Scientific's embedded operating system OS 4.0. This upgrade improves the sonic's "ability to obtain measurements under conditions of low signal to noise ratio, e.g. during rain events. The CSAT3 anemometer's high fidelity wind measurements are unaffected by the new algorithm (for determining the transit time of the sonic pulses), but the resolution of the temperature measurement has changed from 0.002 °C to 0.03 °C." Four NCAR sonics (s/n 800, 853, 855, and 856) that were also used in OHATS had been recently purchased and already had OS 4.0. The change in the OS required recalibration of the sonics, and therefore all OHATS sonics had been recently calibrated by the manufacturer prior to the field project.
After the field project, all 19 sonics were operated in the 89-cm-diameter, low-turbulence wind tunnel of the NCAR Sensor Calibration Laboratory. The working section of this wind tunnel is too small to accurately calibrate the sonics, but the wind tunnel is sufficiently repeatable to examine the consistency of the sonics. This was done by operating the wind tunnel over the range from 0 to 20 m/sec and calculating the linear regression of the wind components measured by each sonic with respect to the wind tunnel speed measured by a pitot-static tube. The orthogonal wind components were transformed into path-parallel wind components using the nominal angles of the paths:
Ua = (-U + sqrt(3)*W)/2
Ub = (U + sqrt(3)*V)/4 + sqrt(3)*W/2
Uc = (U - sqrt(3)*V)/4 + sqrt(3)*W/2
The following tables list the intercept a and slope b of a linear regression of the sonic wind components onto the tunnel speed measured by the pitot tube, e.g.
Ua = a + b*Upitot
| Sonic Position | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| CSAT3 S/N | 246 | 247 | 364 | 366 | 367 | 368 | 369 | 370 | 373 |
| Ua, a (cm/s) | 1.8 | 0.6 | 8.4 | -0.3 | 1.5 | 1.2 | -0.7 | 0.1 | 3.8 |
| Ua, b | -0.472 | -0.470 | -0.464 | -0.471 | -0.478 | -0.471 | -0.471 | -0.475 | -0.469 |
| Ub, a (cm/s) | 3.2 | 1.8 | 2.3 | 1.7 | 0.4 | -1.0 | 0.2 | 0.6 | 1.3 |
| Ub, b | 0.267 | 0.264 | 0.252 | 0.264 | 0.261 | 0.267 | 0.260 | 0.262 | 0.259 |
| Uc, a (cm/s) | -0.3 | 1.0 | 0.2 | 0.4 | 3.1 | 0.2 | 1.6 | 3.2 | 3.5 |
| Uc, b | 0.253 | 0.269 | 0.277 | 0.263 | 0.274 | 0.272 | 0.267 | 0.274 | 0.268 |
| Sonic Position | 1 | 2 | 3 | 4 | 5 | 6 | Spare | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|---|
| CSAT3 S/N | 374 | 375 | 376 | 377 | 378 | 379 | 800 | 853 | 855 | 856 |
| Ua, a (cm/s) | -0.5 | 8.2 | 10.6 | -2.0 | 4.4 | -1.2 | -0.1 | -1.7 | -1.2 | -5.2 |
| Ua, b | -0.479 | -0.499 | -0.473 | -0.468 | -0.468 | -0.470 | -0.466 | -0.462 | -0.463 | -0.475 |
| Ub, a (cm/s) | 2.8 | -7.9 | 0.6 | -1.9 | 1.7 | -4.2 | 1.8 | 1.7 | 5.6 | 0.7 |
| Ub, b | 0.264 | 0.267 | 0.277 | 0.269 | 0.263 | 0.266 | 0.264 | 0.270 | 0.271 | 0.260 |
| Uc, a (cm/s) | 2.8 | 2.2 | 6.1 | 2.5 | 2.9 | 1.4 | -0.1 | 3.9 | 0.6 | -13.7 |
| Uc, b | 0.271 | 0.257 | 0.270 | 0.252 | 0.261 | 0.267 | 0.263 | 0.264 | 0.260 | 0.253 |
If the sonics were perfectly aligned in the wind tunnel and there was no flow distortion caused by the sonic, then the values of the slopes should be 0.5, 0.25 and 0.25. The calculated slopes for Ua are slightly smaller and those for Ub and Uc are slightly larger, suggesting that the sonics are pitched upward by 1°-2°. The variation between sonics could be partly caused by differences of their individual geometries from the ideal assumed to transform from orthogonal to path coordinates.
Most troubling, however, are the intercepts for sonics 364 (Ua), 375 (Ua and Ub), 376 (Ua) and 856 (Uc) that are on the order of 10 cm/s. The CSAT3 specifications suggest that these offsets should be less than 4 cm/s. Also note the larger slope for the Ua component of S/N 375. These four sonics have been sent to Campbell (1/11/05) for a calibration check to determine the validity of these values.
The calibration by Campbell has been completed and the following results received from Ed Swiatek (2/8/05):
s/n 0375 - The head was broken at one of the 45 degree joints. This joint was repaired once before in the past. We are not sure if the join simply failed again or the head was mishandled. The head was repaired and recalibrated using embedded code 3.0 and 4.0.
s/n 0856 - There was a significant amount of water inside the transducers. This water changed the response of the transducers. The response further changed when the water froze. The water was "baked" out of all the transducers. This CSAT3 was never calibrated using embedded code 3.0, thus it was only calibrated using 4.0. (TWH: This was our spare sonic and to the best recollection of Jim Edson, Steve Semmer and me it never left the laboratory at WHOI. It was exposed to rain during the pre-project flow distortion test, but to the best of my knowledge this was its only use outdoors.)
s/n 0364 - It appears that the calibration drifted on this CSAT3. Larry Jacobsen is analyzing the before and after data in an attempt to understand why that calibration drifted. This CSAT3 was calibrated with embedded code 3.0 and 4.0.
s/n 0376 - It appears that the calibration drifted on this CSAT3 as well. Larry Jacobsen is also analyzing the before and after data in an attempt to understand why that calibration drifted. This CSAT3 was calibrated with embedded code 3.0 and 4.0.
Corrections for Sonic Tilts

J. Edson
Figure 1. OHATS sonic array, 8/6/04 (sonics at each height are numbered 1-9 from left to right).

J. Edson
Figure 2. OHATS sonic array, 10/26/04.
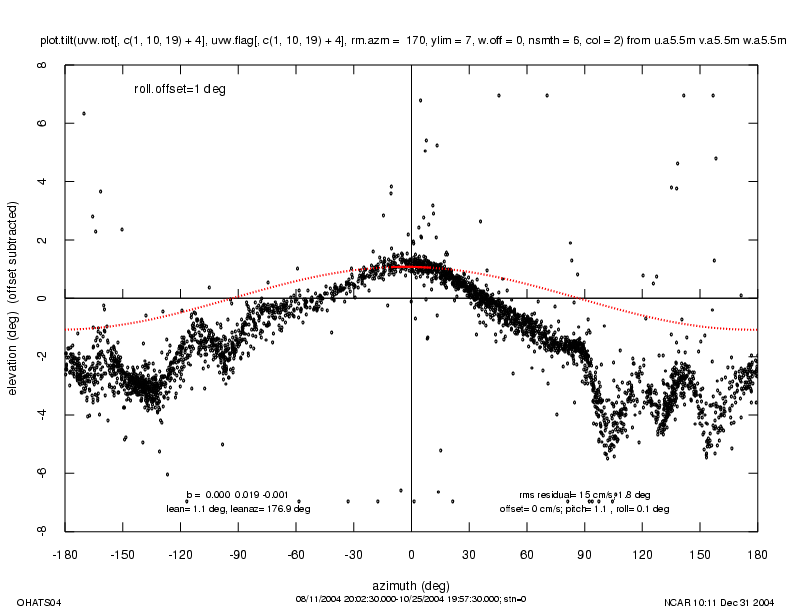
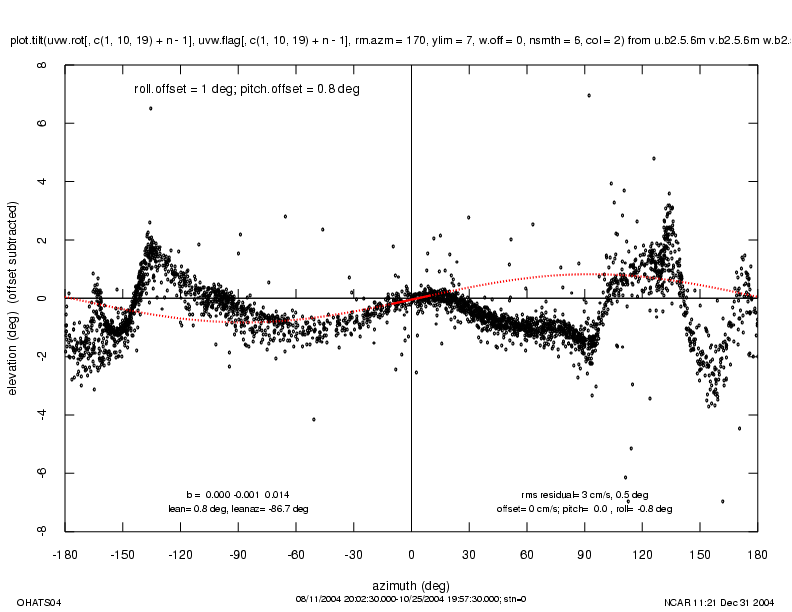
During previous ISFF projects, sonic data have been corrected for tilt of the anemometer using the planar fit technique, which determines the sonic pitch and roll angles by fitting a plane to the measured vertical velocity as a function of wind direction and assuming that deviations from a horizontal plane are caused by sonic tilt. The fit is applied for a restricted range of wind directions that does not include directions downwind of known obstacles such as the tower on which the sonic is mounted or, in the case of the horizontal array technique used in OHATS, directions downwind of adjacent sonics. However even for a narrow range of wind directions, say within ± 45° of normal to the horizontal sonic array, it is evident that there is flow distortion upwind of the ASIT tower which causes a true non-zero vertical velocity.
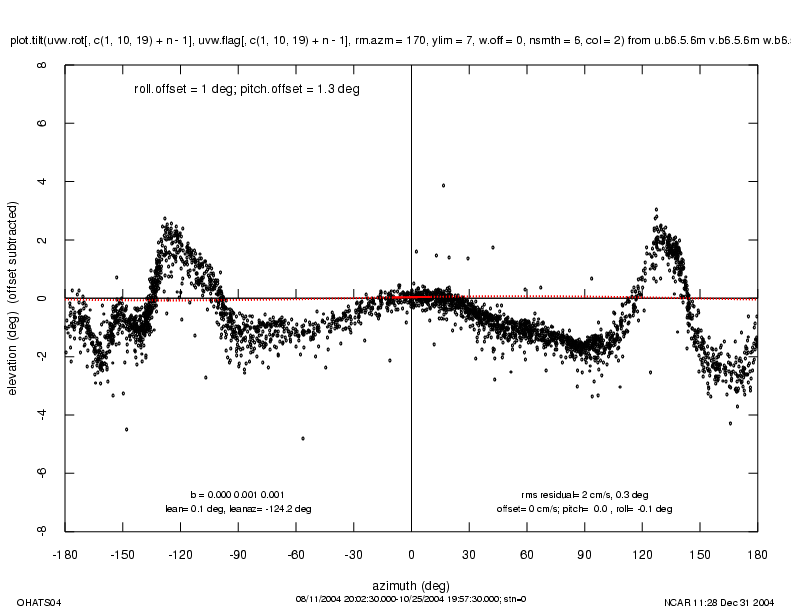
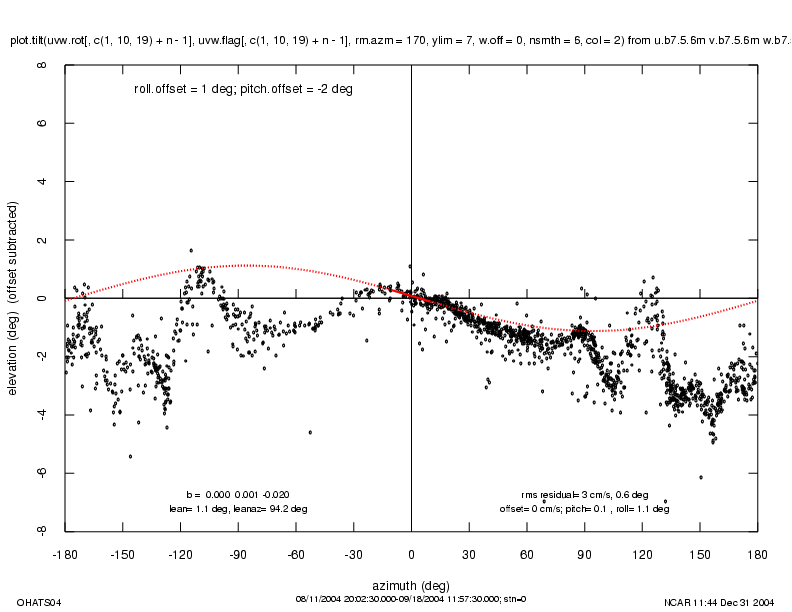
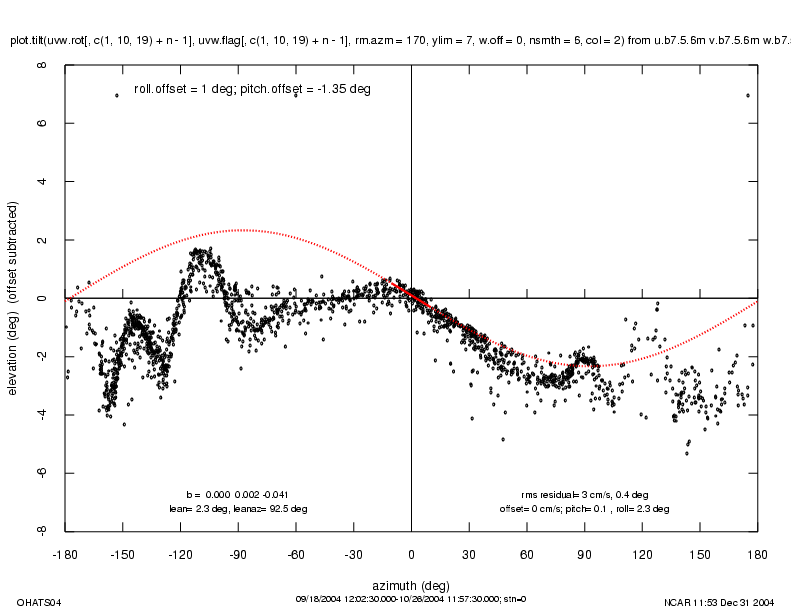
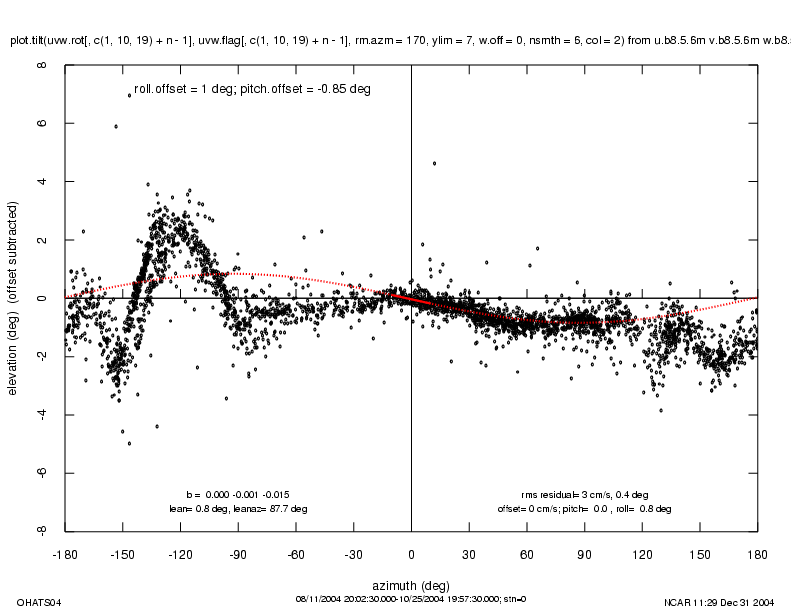
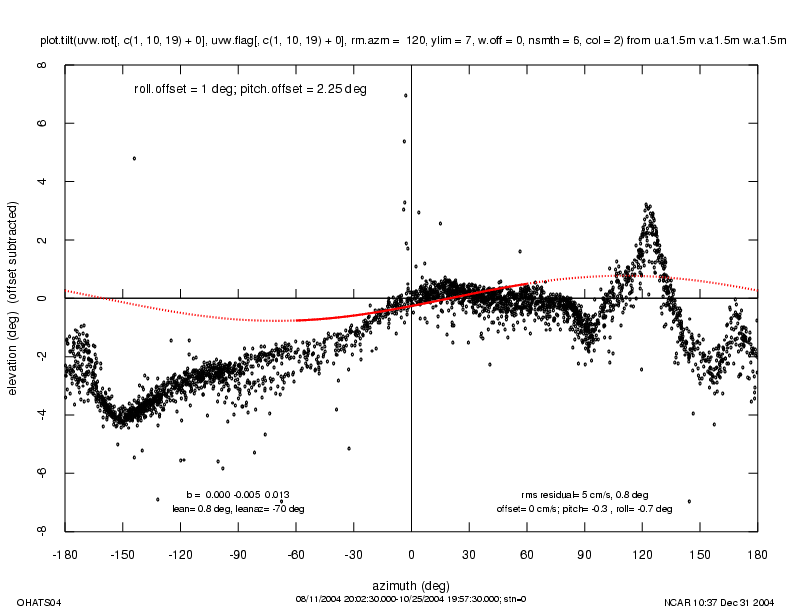
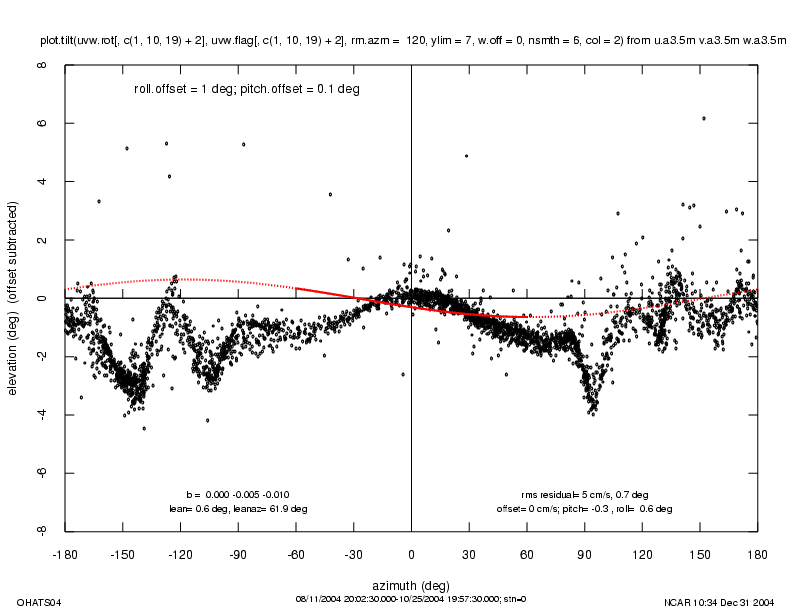
Figure 3 shows an example planar fit for the center sonic at a height of 5 m. The 30-minute-averaged elevation angle of the wind is plotted versus wind direction, where zero azimuth angle is a wind normal to the array. A tilted sonic in a planar wind field (zero 30-minute-average true vertical velocity) maps out a sinusoidal curve as shown on the plot. The distorted flow field upwind of ASIT does not fall on the best-fit sine curve. This occurs for |azimuth| > 90° because the sonics are then downwind of other sonics and the ASIT legs. More seriously, however, the flow is also distorted upwind of the ASIT tower, i.e. for -45° < azimuth < 45°.
{kind=link}

T. Horst
Figure 4. MotionPak (small gray box) mounted on upper (5.6 m) sonic array.
As a consequence of the flow distortion upwind of the ASIT tower, a less objective method is used to rotate the sonic data to a nominally vertical orientation. First the MotionPak data are used to (objectively) remove the pitch and roll angles of the sonic array support structure. The array pitch and roll angles are determined from the 5-minute-average accelerations measured by the MotionPak along three orthogonal axes,
pitch = -sin-1(ax/g)
roll = sin-1(ay/g cos(pitch))
where the acceleration of gravity is calculated as
g = (ax2 + ay2 + az2)1/2 ,
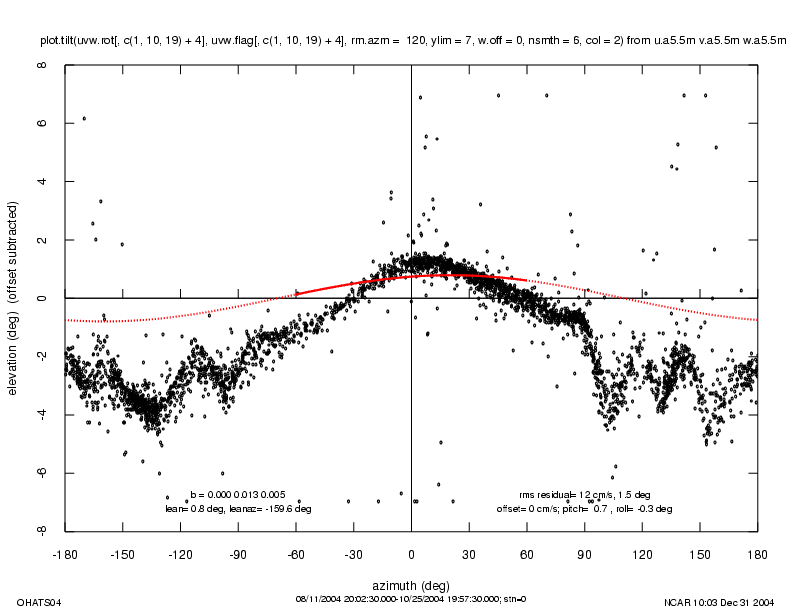
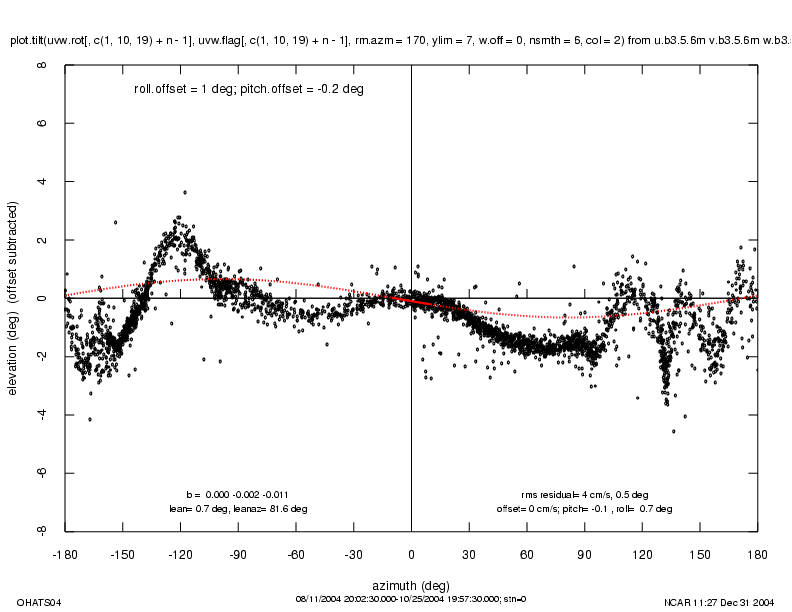
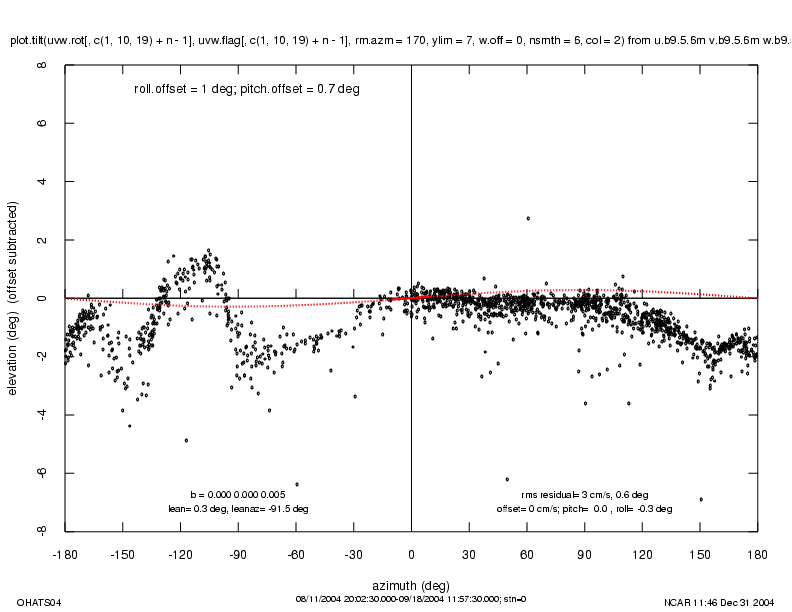
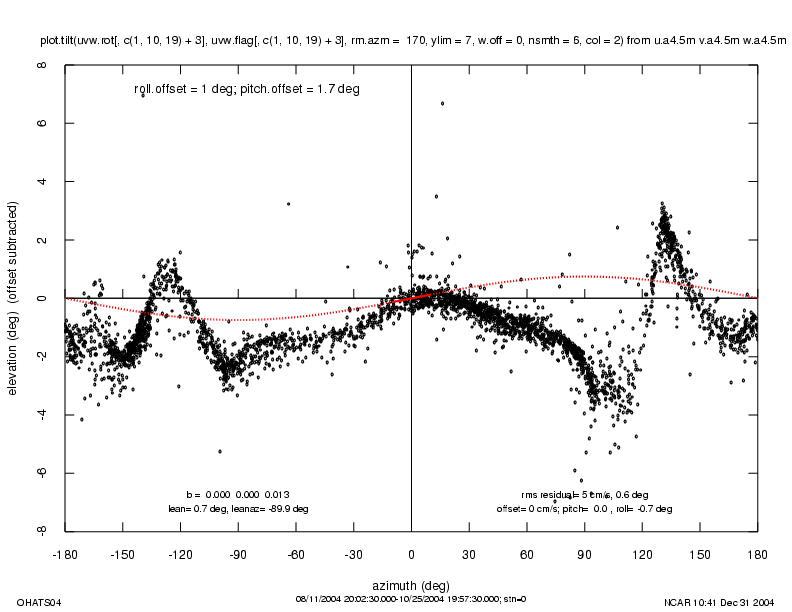
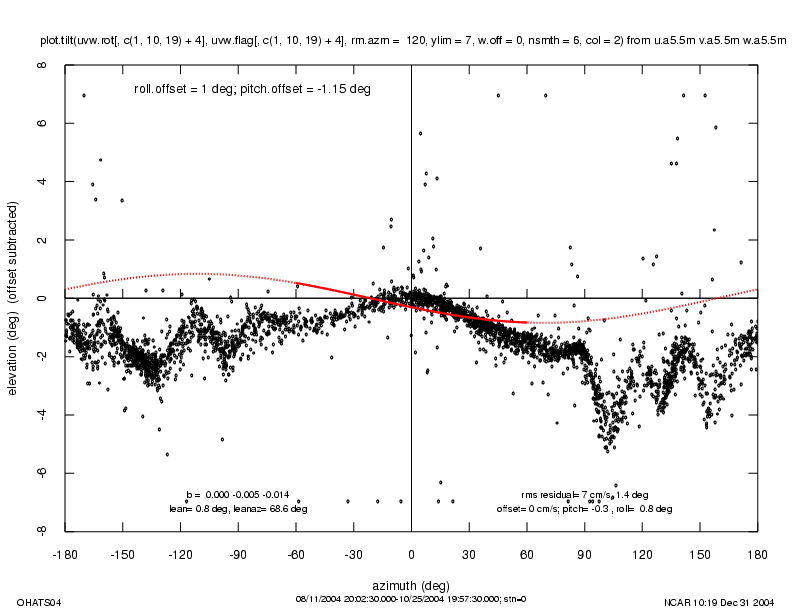
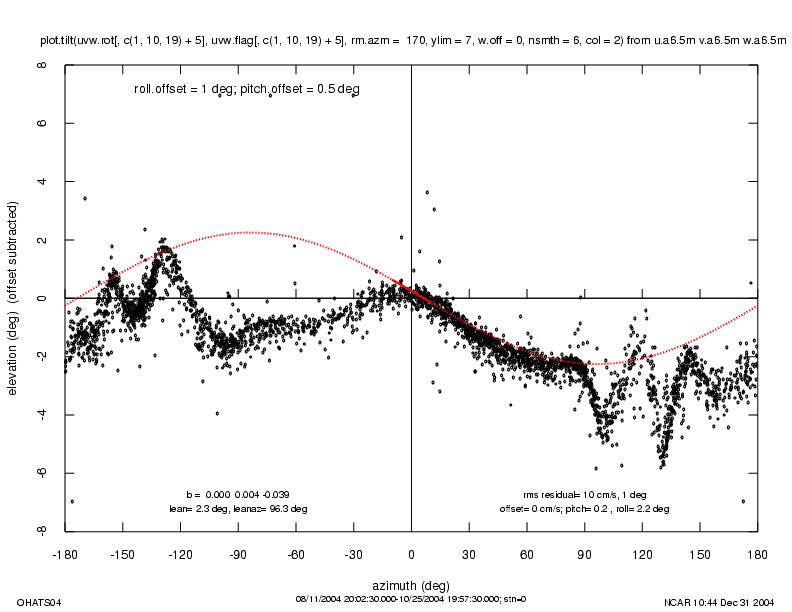
ax is the horizontal acceleration normal to the array (positive in a direction from the array to the ASIT tower), ay is the acceleration parallel to the array (from left to right for an observer on ASIT), and az is the vertical acceleration. (see Edson, Hinton, and Prada, 1998: "Direct Covariance Flux Estimates from Mobile Platforms at Sea", J. Atmos. Oceanic Technol., 15, 547-562.) These angles are roughly -3° in pitch and 1° in roll and are correlated with wind speed and direction. After rotation of the sonic data using these measured angles, it was found that tilt plots for the center sonic in each of the two arrays, e.g. Figure 5, was not symmetric about a wind direction normal to the array, as might be expected due to the symmetry of the supporting structures at that location. This was corrected by subtracting an empirically-determined offset of 1° from the roll angle measured by the MotionPak, Figure 6, felicitously also reducing the net roll angle to ± 0.2°. It is assumed that this offset reflects a misalignment of the MotionPak relative to the horizontal array.
{kind=link}
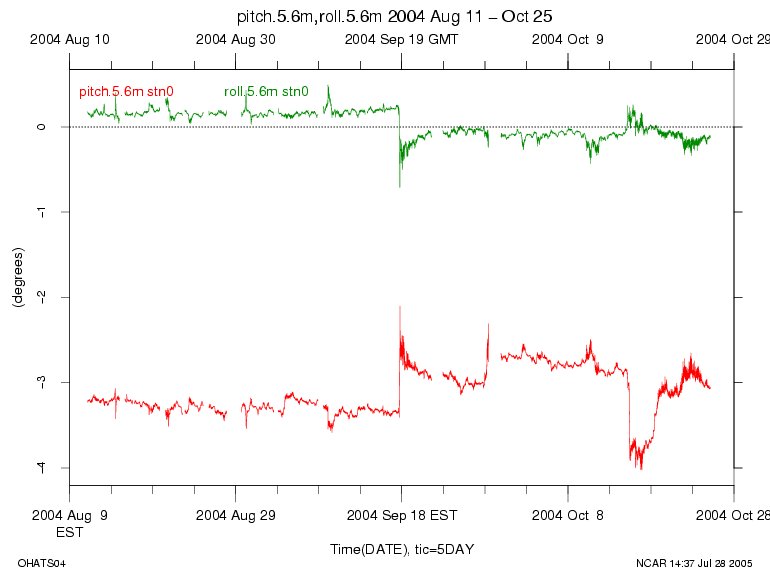
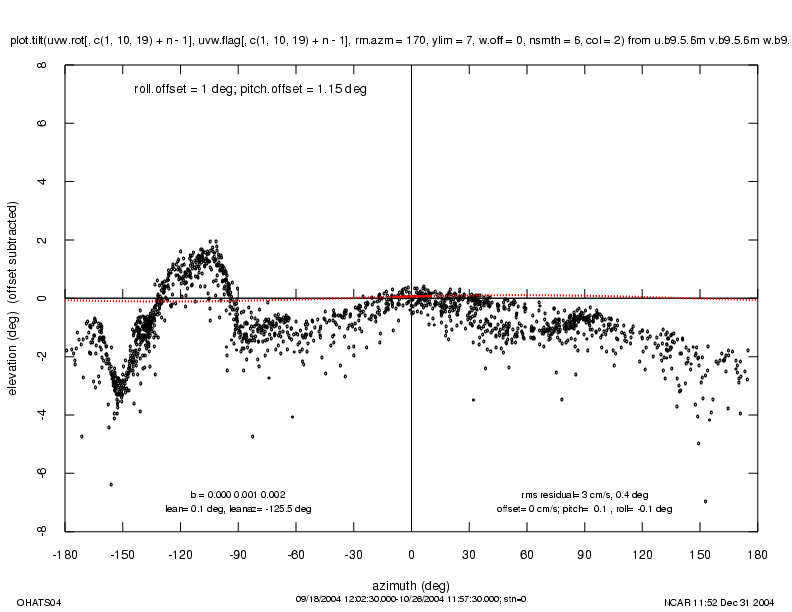
Figure 7 shows the pitch and roll angles of the array after correction for the roll offset. Note that beginning around noon on September 18, a wind of 10-15 m/s from the back of the array permanently reduced the pitch angle by about 0.5°. Another strong wind event from the opposite wind direction occurred in the third week of October.
{kind=link}
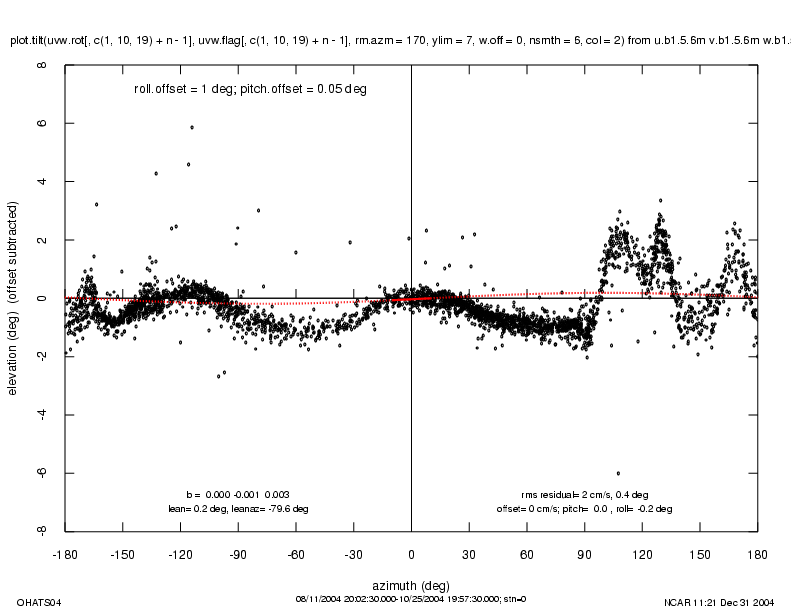
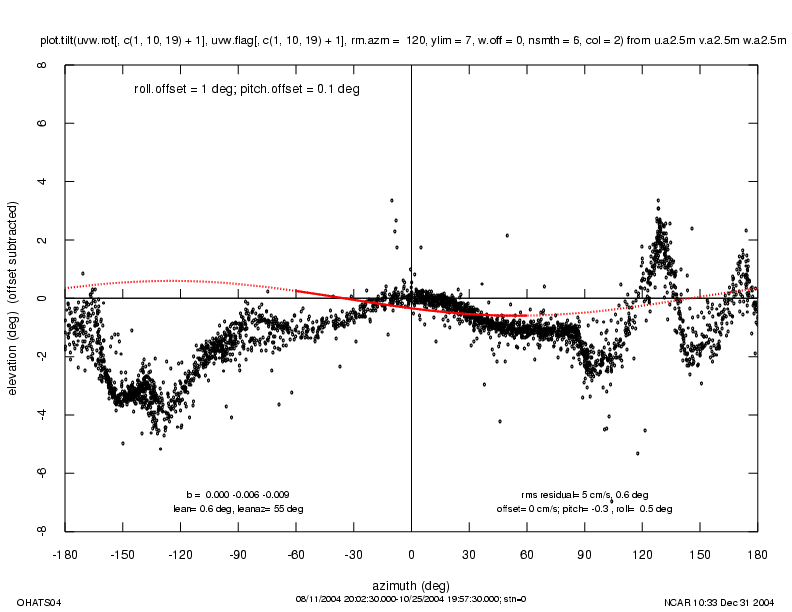
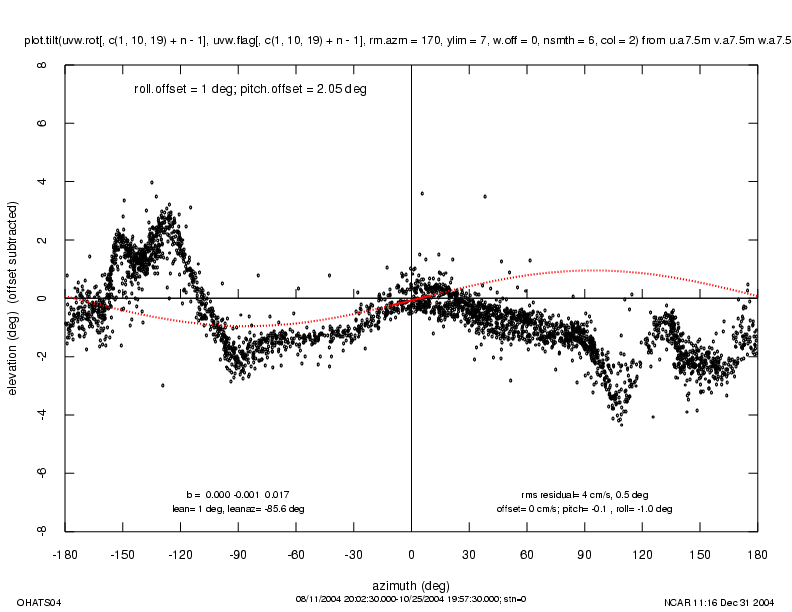
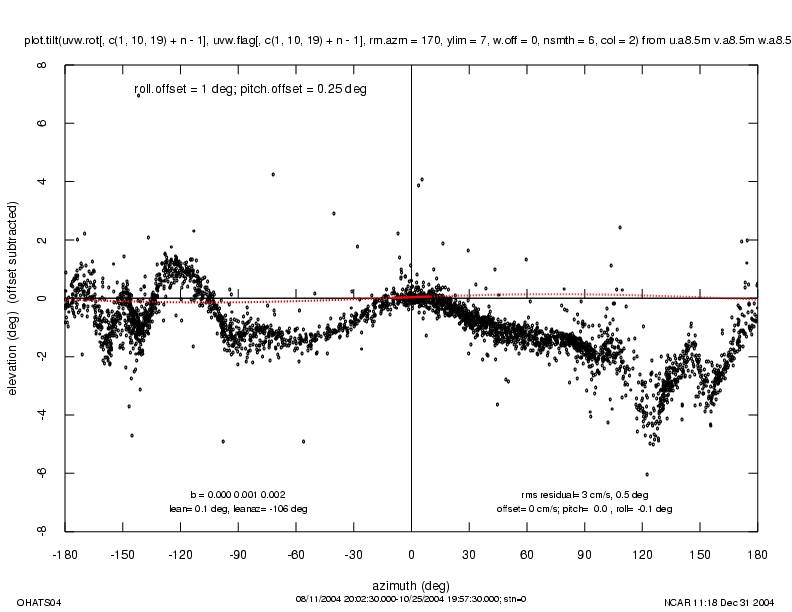
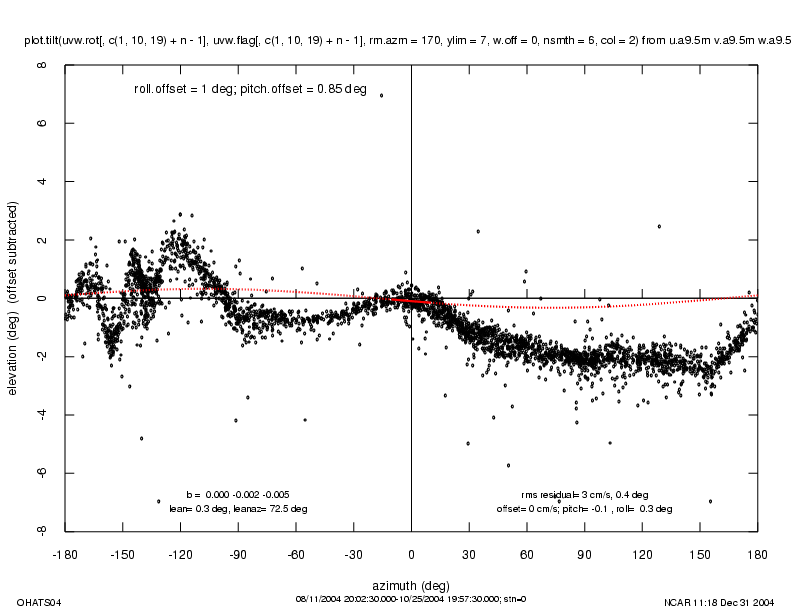
Finally, the sonic pitch associated with sag of the sonic booms is determined by (subjectively) assuming that the vertical velocity at the location of each sonic is equal to zero for a wind direction normal to the array. These derived pitch angles range up to ± 2°, but 60% are within the range ± 1°. Although the assumption used in this final step is arbitrary, the pitch angles determined in this manner are qualitatively consistent with the relative pitch of adjacent sonics as seen in photographs of the array, Figures 1-2. (Note in particular that the relative pitch angles of the sonics appear to be unchanged over the deployment period.) These angles, shown in the following table, are subtracted from the pitch measured by the MotionPak, e.g. a sonic pitch offset of 2.25° (sonic 1 at 5 m) subtracted from an array pitch of -3° produces a net sonic pitch of -5.25°.
| Sonic Position: | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Height=5.6 m | 0.05 | 0.8 | -0.2 | 0.5 | 0.2 | 1.3 | -2.0 /-1.35 | -0.85 | 0.7 /1.15 |
| Height=5.0 m | 2.25 | 0.1 | 0.1 | 1.7 | -1.15 | 0.5 | 2.05 | 0.25 | 0.85 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
The individual tilt plots can be seen by means of the links in the table. The sonic position in the table is its ordinal location when facing into the array toward the ASIT tower and counting from left to right. The 7th and 9th sonics at 5.6 m appear to have changed their pitch during a high wind event from the back of the array near noon on September 18. The double entries for those sonics refer to the pitch angles prior to and following that event.
Correction for Array Movement
The planar fit technique is not applicable to the OHATS sonic data because of flow distortion upwind of the ASIT tower. As a consequence the absolute values of the pitch and roll angles of the sonics cannot be determined, although the relative pitch angles of the sonics are probably accurate to better than 1°. Because we do not know the relative alignment of the MotionPak and the sonics, the uncertainty in sonic pitch and roll will cause errors when attempting to remove the array movement from the sonic data. It may be that these errors are acceptable, but this remains to be determined.


























