Gulfstream V High Spectral Resolution Lidar (GV-HSRL)
The Gulfstream V High Spectral Resolution Lidar (GV-HSRL) is an eye-safe, self-calibrated lidar that can measure backscatter coefficient, extinction coefficient, and depolarization properties of atmospheric aerosols and clouds. The system flies in the cabin of the NSF/NCAR HIAPER GV aircraft for upward and downward pointing observations.
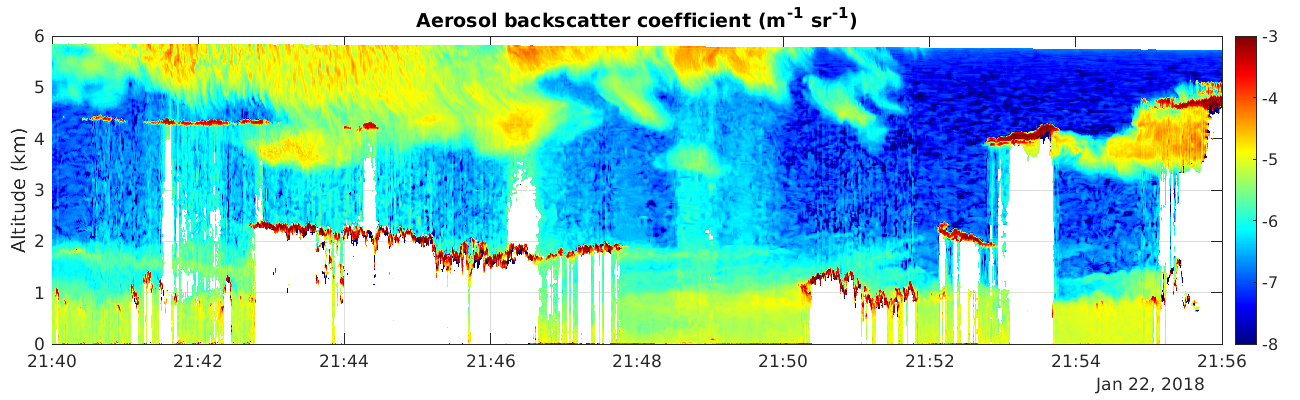
HSRL is a self calibrating lidar technique that separates molecular backscattering from aerosol and cloud particle backscatter based on their Doppler spectrum widths. The molecular backscatter is used to calibrate the aerosol backscatter cross section from the ratio between the molecular signal and the aerosol signal. The aerosol extinction is calculated by comparing the expected molecular return to the actual molecular return signal. The instrument provides information used to characterize cloud and aerosol particles in order to create better models of the energy transfers in the atmosphere, and subsequently improve atmospheric and weather modeling for the planet.

Specifications
The high-repetition, low-pulse energy laser is expanded to fill the telescope aperture so it meets the eye-safety criteria of the American National Standards Institute (ANSI) at all ranges. The design uses a shared telescope which gives the same field-of-view (FOV) to both the transmitter and receiver so the lidar alignment is very stable. When on-board an aircraft, the telescope can be rotated between zenith and nadir pointing in few seconds during flight. A safety interlock insures that the outgoing laser shutter is open only when the telescope is locked in either the nadir or zenith position.
| Parameter | Specification |
| Wavelength | 532 nm |
| Pulse repetition rate | 4000 Hz |
| Average power | 300 mW |
| Range resolution - minimum | 7.5 m |
| Telescope diameter | 40 cm |
| Field of view (FOV) | 0.025° |
| Temporal resolution - minimum | 0.5 s |
| Receiver channels - 4 | Molecular, combined hi, combined low, cross-polarization |
| Iodine blocking filter bandwidth | 1.8 GHz |
| Etalon filter bandwidth | 8.0 GHz |
Contact
NCAR/EOL HSRL Team. (2012). Gulfstream V High Spectral Resolution Lidar (GV-HSRL). UCAR/NCAR - Earth Observing Laboratory. https://doi.org/10.5065/